声明:本网站或平台上提供的所有信息仅供本人记录参考之用,且不构成任何形式的法律、财务、医疗或其他专业建议。尽管我们力求确保内容的准确性和完整性,但我们不对信息的及时性、可靠性或适用性作出任何保证或承诺。使用者对依赖此类信息所产生的任何结果承担全部责任。文中所涉及内容若侵权,请联系作者删除。
前置准备
- ubuntu系统安装:ubuntu18.04官网下载地址
- apt/pip换国内源:更改 Ubuntu22.04 系统软件源&pip源 – Martin.xu – 博客园 (cnblogs.com)
ROS安装
- 官网地址:https://docs.ros.org/
- ubuntu支持版本查询:https://www.ros.org/reps/rep-2000.html#rolling-ridley-june-2020-ongoing
- 一键安装工具:小鱼的一键安装系列 | 鱼香ROS (fishros.org.cn)
运行测试
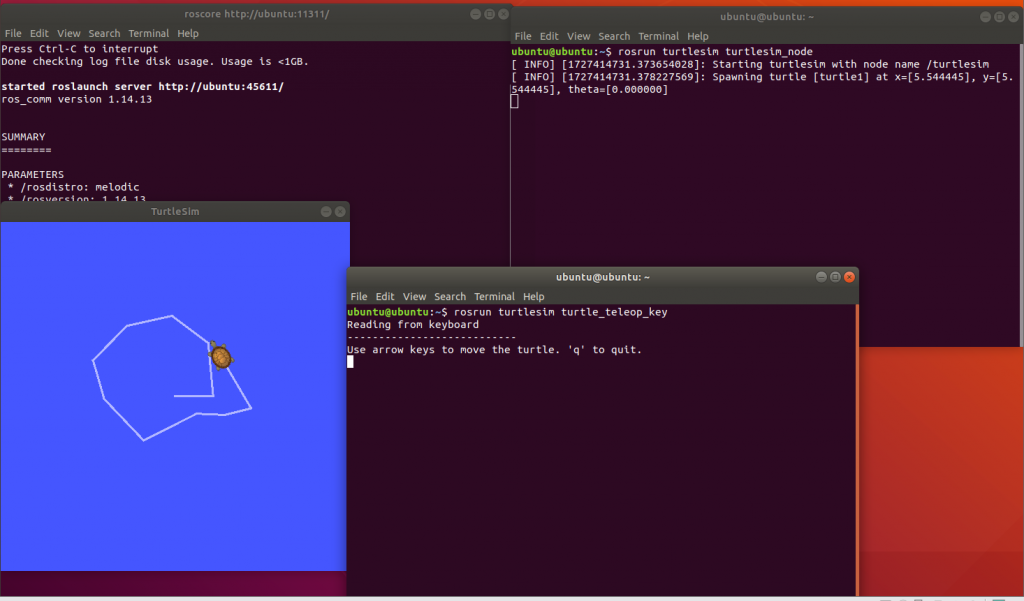
#打开三个终端,分别执行以下三个命令
roscore #打开主进程
rosrun turtlesim turtlesim_node #运行turtlesim 包中的turtlesim_node节点,打开小乌龟控制台
rosrun turtlesim turtle_teleop_key # 运行turtlesim 包中的turtle_teleop_key节点,可以使用键盘方向键移动小乌龟运行效果截图
数据集测试
新建ROS工作空间
catkin_ws是ROS(Robot Operating System)中的一个工作空间,用于组织和构建ROS包。它通常包含src文件夹、build文件夹和devel文件夹,方便管理项目依赖和编译。
#打开终端,进入你想创建工作空间的目录。
mkdir -p catkin_ws/src #创建目录
cd catkin_ws/src #进入src文件夹
catkin_init_workspace #初始化工作空间。
cd .. #返回到工作空间目录
catkin_make #构建工作空间
source devel/setup.sh #配置当前终端临时环境变量,使其能够识别catkin工作空间中构建的包和依赖(仅对当前终端生效)
echo $ROS_PACKAGE_PATH #验证环境变量是否配置成功(默认值为/opt/ros/melodic/share
)
sudo vim ~/.bashrc
alias spp="source \$(pwd)/devel/setup.sh && echo 'set ROS package ok';echo \$ROS_PACKAGE_PATH"
#设置别名,方便每次设置新工作空间的环境set_package_path
编译VINS-Mono代码
mkdir -p catkin_ws/src #新建工作空间
cd catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
cd ../
catkin_make
source ~/Desktop/catkin_ws/devel/setup.bash #或者spp下载数据集
#下载到catkin_ws目录下,建议挂个代理,不然下载速度缓慢
wget http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_01_easy/MH_01_easy.bag工作空间文件结构
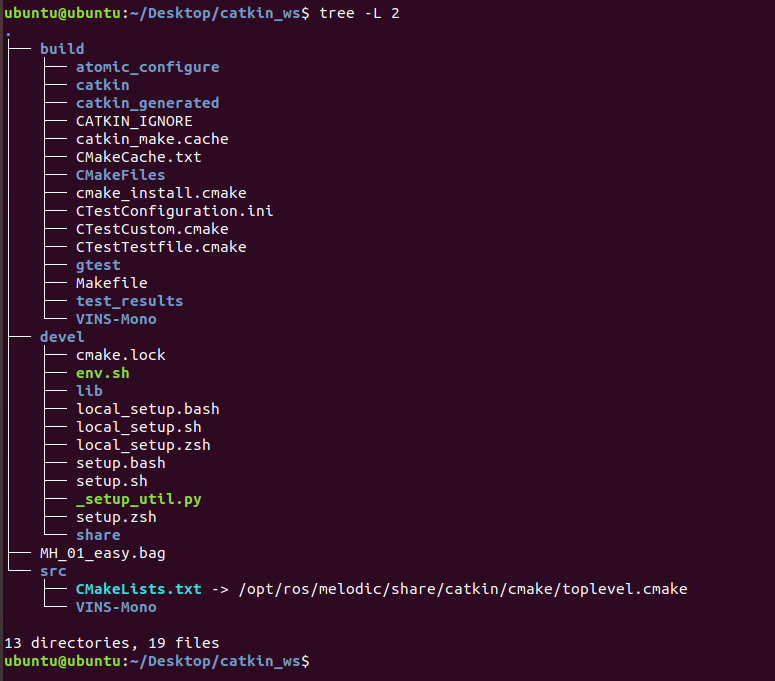
运行数据集及VINS-Mono代码
创建三个终端分别执行以下三条命令,工作目录都在catkin_ws路径下
#第一个终端
spp
roslaunch vins_estimator euroc.launch#第二个终端
spp
roslaunch vins_estimator vins_rviz.launch#第三个终端
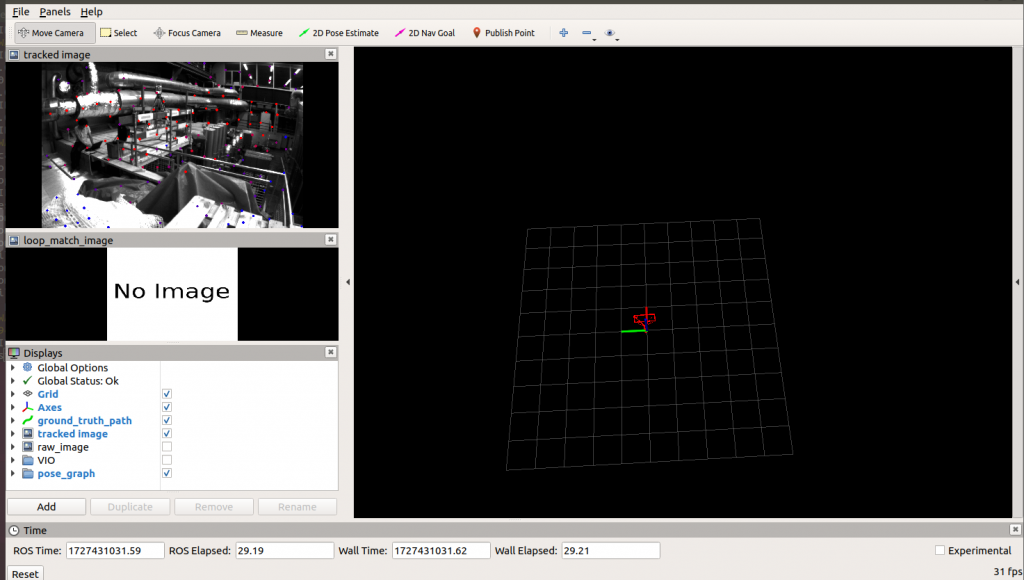
spp
rosbag play MH_01_easy.bag运行截图
遇到的问题:
- 未安装Ceres Solver依赖导致VINS-Mono编译失败
sudo apt install libceres-dev